 |
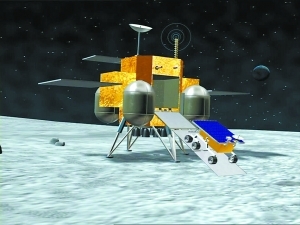
Illustration of a lunar rover in China that performs exploration missions on the moon's surface.
After the lunar lander has softly landed on the surface of the moon, the lunar rover slowly descends along a ramp to the surface of the moon. (schematic)
News background
According to the 2012 National Defense Technology Industry Conference held recently, the Chang'e III mission in the second phase of the lunar exploration project, China’s lunar exploration project, has successfully completed the hovering obstacle avoidance and slow descent test of the lunar lander and the moon patrol. The comprehensive tests and internal and external field tests and other verification tests, the technical solutions have been verified, and the engineering development has made significant progress.
1 "Zhonghua" Lunar rover range of 5 square kilometers
Before and after 2013, China will launch the first lunar landing sensor - Chang'e 3, which consists of a lander and a patrol detector (the "Zhonghua" lunar rover). It will carry out the first lunar soft landing and automatic patrol survey to obtain the moon. The internal material composition was analyzed and the "surface detection" of the first phase project was extended to internal detection. Among them, the lander is waiting at a fixed point. The lunar rover cruises on the surface of the moon for 90 days and the range can reach 5 square kilometers. The lunar rover can be analyzed in the car and the data obtained will be transmitted directly to the earth.
According to reports, the specific characteristics of the Chang'e III mission can be summarized as follows:
Choose different regional landings from the past;
The lunar surface soft landing in place detection and the lunar rover inspection and exploration are simultaneously conducted and organically combined, and more meaningful detection results than before will be obtained;
In the international community, for the first time, moon measurements were used to measure the thickness of the lunar soil (1 to 30 meters) and the moonshell rock structure (1 to 3 kilometers).
For the first time, a data transponder was used to accurately measure the distance between the ground and the moon at the soft landing site for lunar dynamics research.
For the first time, we conducted moon-based VLF radio interference observations of space and space objects outside the solar system, and conducted very low-frequency observations of solar radio bursts and spatial particle flow, optical kilometre wave radiation, coronal mass ejection planetary low-frequency noise, and extrasolar solar bodies.
For the first time, an ultra-violet camera was used to observe the effects of solar activity and geomagnetic disturbance on the EUV radiation in the plasma layer of the Earth's space, and the role of the plasma layer in the space weather process was studied.
The moon-based optical astronomical observations were conducted for the first time to study the extrasolar planet system, the starburst, and the active galactic nuclei.
2 Soft landing with landing engine and buffer
In the lunar and deep space exploration activities conducted by humans, from the point of view of the directness and richness of acquiring detection data, soft landing detection and patrol survey are not substitutes for other types of detection. However, it has to break through a series of key technologies such as the moon's soft landing, automatic patrol survey, deep space observation and control communications, and moon and night survival.
Among them, the soft landing is the first step to embark on another planet for field scientific exploration.
The soft landing on the moon's surface can be divided into three phases: the proximity of the detector to the lunar surface, the ignition of the soft landing engine, and the landing impact until stability. Because there is no atmosphere on the lunar surface, it is not possible to use air power to decelerate landing. A soft landing engine and landing buffer must be used.
The lunar soft landing mode buffer can be divided into two types: airbag type and landing type. The landing mechanism can be divided into several structural forms such as petal type, truss type and thin-walled shell type.
Because the thermal conditions and solar radiation conditions on the lunar surface are different from those of the Earth, in order to ensure the normal operation of the lander, the following must be studied: the overall design technology of the moon surface soft landing detector; the design and control of the landing track; the dynamics of the landing process Analysis and design.
3 month inspections to adapt to "local geography"
The moon surface automatic patrol detection technology is mainly used by the lunar rover to automatically drive on the surface of the moon, use the vehicle payload to perform panoramic and close-up photography of the lunar surface, analyze the chemical composition of the lunar surface, and transmit the acquired information back to the ground.
Due to the harsh working environment on the moon surface, the temperature difference between day and night as high as 300°C, rough terrain, and soft surface, it puts forward high requirements for the lunar rover. It not only requires clear eyes, strong pace, ingenuity, but also can “starve. ". The lunar surface automatic patrol detection technology contains many key technologies, including the overall design of the lunar rover, autonomous navigation and motion control methods, and ground simulation experiments.
The lunar rover is generally divided into two categories: one is an unmanned lunar rover, which is composed of a wheeled chassis and an instrument cabin. It contains a variety of scientific detection equipment, and is powered by a solar battery and a battery. Its driving is based on ground remote control commands. It can be inspected on the moon's surface. China’s Chang’e III and IV (Chang’e IV is the backup of the 3rd) and the Soviet moonwalker’s No. 1 and No. 2 lunar rover are of this type. They can also be called lunar robots. . The other type is a manned lunar rover. It is mainly used as a means of transportation to expand the scope of astronaut activities and reduce physical exertion. It can store rock and soil specimens collected by astronauts at any time. The United States used this when the Apollo manned the moon. Lunar rover.
4 China, Europe, Japan and India are all aiming for "falling moon detection"
In general, the human lunar exploration can be divided into three major steps: lunar exploration, landing on the moon, and resident in the moon, namely, exploration, boarding, and residence. At present, the United States has completed the first two phases. In the future, it will focus on the third phase, that is, building a lunar base for people to live and work for a long time. The Soviet Union/Russia has completed its first phase and can carry out manned landings in the future.
Europe, Japan, China, and India are all in the first stage. They use the probe as the main attack direction, and follow the lunar exploration, lunar exploration, and sampling to return, that is, “around, falling, and returning†in three small steps. Gradually accumulate knowledge and experience.
From this it can be seen that the United States and the Soviet Union are the first group to explore the moon, among which the United States is the most advanced. Europe, Japan, China, and India are the second group of lunar explorations. They have all completed the lunar exploration, and they have begun to target the next goal, lunar exploration.
Before and after 2018, China will also break through the sampler, moon landing technology and high-precision lunar sample analysis technology, etc., and launch the Lunar Moon Sampling Return Detector to conduct a thorough investigation of the moon. Its core mission is to achieve lunar sample collection and return to earth automatically for scientists to learn more about the moon.
In addition, according to the White Paper of China's Space Flight of 2011, China is launching the demonstration of the first phase of the manned moon landing. Some Chinese science and technology experts have suggested that China conduct manned landings in 2025 or 2030.
Extended reading
There are six ways to explore the moon in the future
Since entering the 21st century, the world has set off a lunar exploration boom.
So far, humans have launched a total of 129 ball detectors in the United States, 59 of them in the United States, 64 in the Soviet Union, 2 in Japan, 2 in China, 1 in Europe and 1 in India. The success rate is about 50%. This is mainly the Soviet Union and the United States. The lunar probe launched early failed more. The lunar probes launched after the 21st century were all successful.
With the rising level of lunar exploration technology, the early methods of flying over or approaching the surface of the moon are no longer used, but some new lunar exploration methods have been added to make the lunar exploration more extensive and deeper. growing. There are several ways to use the lunar exploration mainly and now for the foreseeable future:
1. Use moon exploration satellites to obtain moon information in a long time.
2. The detector lands softly on the surface of the moon and conducts on-the-spot inspections, shooting detections, and sampling analysis in a fixed or rover mode.
3. Obtain a sample and return it to the Earth with a manned or unmanned detector after a soft landing on the lunar surface for detailed analysis in the laboratory.
4. Percussive detection, which is different from early hard landing, is mainly used to detect the internal structure and composition of the moon.
5. Launch dart penetrating detectors. Future Japanese Moon-A and British “Moonlight†detectors will be typical representatives of these types of detectors. They will be launched on the lunar surface to study lunar quakes and Other subsurface phenomena penetrators.
6. Establish a permanent manned base on the Moon to develop and use the moon's resources, energy and special environment, and paving the way for manned Mars navigation.
(Pang Zhihao Executive Editor, International Space Magazine)
Ultra Plantâ„¢ Grow Light offers One Chip Technology aimed to meet your indoor growing expectation such as improve plants' quality, increase yield, or better the margin, etc., all for helping you realize a higher return on your crops.
Ultra Plantâ„¢ Grow Light is combined our advanced All-In-One technology with patented optical design and customized light full spectrum supported from our experienced LED engineers, plant specialists and other partners working on horticulture.
From Ultra Plantâ„¢ APP, you are able to schedule the growing process including photoperiod, brightness and spectral in advance. The lighting system will help you grow smarter, easier and better.
Ultra Plantâ„¢ is the most versatile horticultural grow lighting fixture for indoor plants with flexible full spectrum, brightness control and uniform, wider light distribution, suitable for top lighting of all types of crops. No matter it applies to anywhere for any crop, Ultra Plantâ„¢ can do perfect work for you.
200W Led Grow Light,Best Grow Lights,Grow Lights,Fluorescent Grow Lights
Feton Corporation , https://www.ultraplantgrowled.com