Welding is a very important processing technology in the industry, and its application in the automotive industry is particularly important. With the rapid development of the automotive industry, automated welding equipment has been widely used, especially in the period of labor shortage in recent years, so that robot welding equipment has been well applied in the production of automotive parts.
Originally, the rear axle of the car was basically welded by special plane and manual, but this manufacturing mode is slowly replaced by robot welding. Because the efficient welding robot can adapt to more complicated welding, and can better guarantee the welding quality and reduce the labor cost, it is one of the important components to improve competitiveness.
First, the two-machine coordination function of Motoman robot is the unique independent/coordinating technology of the robot.
In the work, we will encounter long and rigid and symmetrically distributed workpieces at both ends. The welds are distributed at the two ends of the workpiece. If one robot is used for welding, it will be caused by welding at different ends. The problem of inconsistent welding deformation causes torsional deformation of the workpiece in the longitudinal direction, and the workpiece after welding is difficult to meet the dimensional requirements. For this type of workpiece, the best way is to use two robots to coordinate the welding at the same time, which promotes the two-machine coordinated welding technology of two robots. This technology contains a relatively high technical content and is a high level of robot coordination technology.
This technology is often used in the welding of automotive rear axles and mufflers during production.
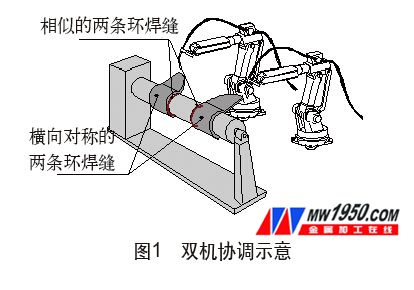
In Figure 1, two robots correspond to one positioner driven by the external axis of the robot. There are two mirror-symmetrical parts on the workpiece placed on the positioner. Two similar ring welds require two. The robot realizes synchronous coordinated welding while the positioner rotates. In this way, the efficiency of welding production can be doubled, which is only one aspect. Sometimes, we will encounter the welding process requires that this welding method be used, which is what it means.
The two-machine coordinated operating system has the following characteristics:
First, the external shaft is driven by a servo motor, which is an external additional axis of the robot, and can establish a coordination relationship with both robots.
Second, the synchronous coordination of the two robots with the external axis is achieved by parallel startup. Parallel startup makes it easy to control the coordinated operation of two robots with external axes (R1+S1:S1 and R2+S1:S1) to operate in a “stand-alone†manner or in a “synchronous†manner.
Third, due to the parallel launch application, it is easy to control and plan the tasks of the two robots, and the use of the "synchronization point" ensures that the two robots operate in a safe trajectory and controlled timing during operation. This avoids the occurrence of collision accidents and simplifies process control.
Fourth, in the teaching operation, after completing the teaching procedure of one robot, the operation program of another robot can be generated by the "mirror direction" method, which greatly shortens the teaching time and improves the work efficiency.
Fifth, the operating mechanism of the two-machine coordination system. In the two-machine coordination system, the job flow control is planned by a “main task†program to start the “sub-task†branch program. The sub-task program is started simultaneously by the command PSTART...PWAIT, but the task can be “synchronizedâ€. The relationship can also be an independent relationship.
Second, two-machine coordination high efficiency welding example
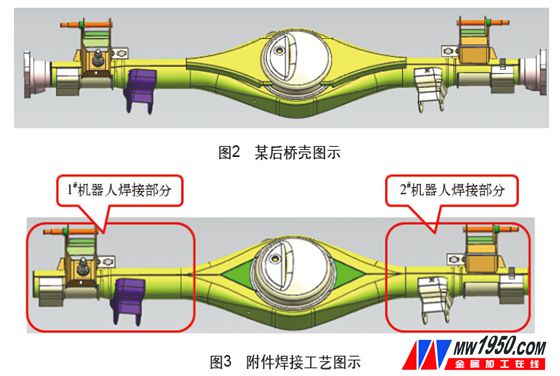
The attachment of a rear axle housing (see Figure 2) of our company is mainly welded by Motoman two-machine coordinated double-station robot workstation. The workstation improves the welding automation and high-efficiency welding level by adopting the 3-axis large flip positioner. The workstation is welded inside, and the parts are clamped on the outside. The robot is welded at the same time, which can ensure the welding speed and reduce the welding deformation. If you need to solder other models, you can produce other models by simply removing the clamps on both sides and replacing them with other fixtures.
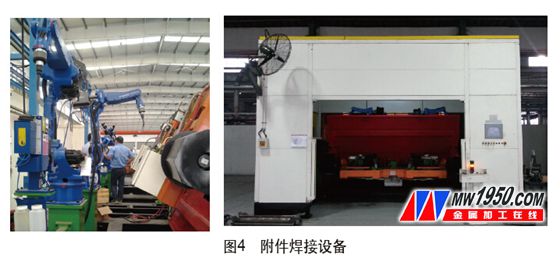
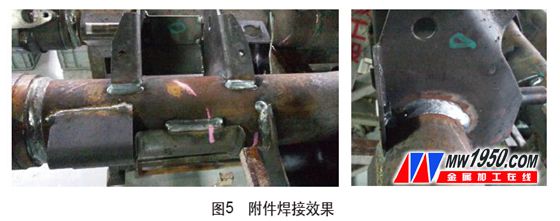
For the workpieces symmetrically distributed around the left and right welds, the 1# robot and the 2# robot are welded at the same time (see Figure 3), which not only improves efficiency, but also reduces the shrinkage deformation of the weld. In order to meet the beat, the attachment is welded into two parts and welded by two robotic workstations. The welding effect of the accessory welding equipment and accessories is shown in Figure 4 and Figure 5.
Third, the conclusion
After the robot workstation is welded, the deformation of the rear axle welding is greatly reduced. After the welding is finished, the rear axle has a deformation of 2 mm in the axial direction. After the two machines are coordinated and welded, the deformation is reduced. 0.4mm, at the same time the welding seam is full, the welding slag splashes less, and the weld seam is beautifully formed.
Using this robotic welding station also has the following advantages:
(1) After the implementation of the process, only one operator is required, and 4 sets of robot workstations can be operated at the same time, saving 3 operators per shift compared to manual welding.
(2) According to the annual salary of each welder of 50,000 yuan, 3 shifts per day, after the implementation of the project, the annual labor cost can be saved 600,000 yuan, and the investment cost can be recovered in less than 4 years.
(3) The use of robotic workstations for welding, the quality is stable and reliable, no longer affected by various human factors, can enhance the competitiveness of our company's products.
(4) After the robot workstation is built independently, the company's corporate image can be enhanced and accumulated and precipitated in technology.
STAIR BOARD
Name : STAIR BOARD Vinyl flooring (spc flooring,click spc flooring)
Board Thickness : 4.0-7.0mm
Wearing Layer Thickness :0.3mm,0.5mm as regular
Surface Texture :Deep Grain,Wood Grain,Marble Grain,Stone,Carpet
Finish :UV-Coating
Installation :Click system(Unilin,Valinge)
Delivery Time :15-25 days
Size:6''*48''(150mm*1220mm)
7''*48''(182mm*1220mm)
9''*48''(230mm*1220mm)
9''*60''(230mm*1525mm)
Backing Foam :IXPE(1.0mm,1.5mm,2.0mm) EVA(1.0mm,1.5mm)
Density :2.07kg/m3
Surface :Wood Embossed,Deep Wood Embossed,Handscraped,Eir.
Usage :Bedroom,Kitchen,Basements,Home,School,Hospital,Mall,Commercial to use.
Features :Waterproof,Wear resistant,Anti-slip,Moisture Proof,Fireproof,durable, anti-scratch, anti-bacterail.
Market :Export to American,Canadian,European Market,Part Asia,Africa Countries.Australia Market
Warranty :10 years for commercial and 25 years for residential
Stone Plastic Composite vinyl flooring is more and more popular new style eco-friendly vinyl flooring. SPC rigid flooring is set apart from other types of vinyl flooring by its uniquely resilient core layer. This core is made from a combination of natural limestone powder, polyvinyl chloride and some stabilizers.
SPC vinyl is a luxury vinyl flooring option with a structurally rigid, 100% waterproof core. SPC is also known as rigid core vinyl, and we use these terms interchangeably. Rigid core engineered vinyl flooring is designed to look like wood or stone, but requires less upkeep.
This flooring is durable, waterproof, and perfect for DIY installation. It`s ideal for both home and commercial areas.
STAIR BOARD,PVC STAIR BOARD,SPC STAIR BOARD,WPC STAIR BOARD
JIANGSU PERFECT NEW MATERIAL TECHNOLOGY CO., LTD. , https://www.bffloor.com